 8 TRỤC MIG/MAG HONGLU")
GIẢI PHÁP TRẠM ROBOT CANTILEVER (TREO) 8 TRỤC MIG/MAG HONGLU
Trang chủ Dây chuyền tự động hóa Giải pháp hàn robot GIẢI PHÁP TRẠM ROBOT CANTILEVER (TREO) 8 TRỤC MIG/MAG HONGLU



GIẢI PHÁP TRẠM ROBOT CANTILEVER (TREO) 8 TRỤC MIG/MAG HONGLU
In trang
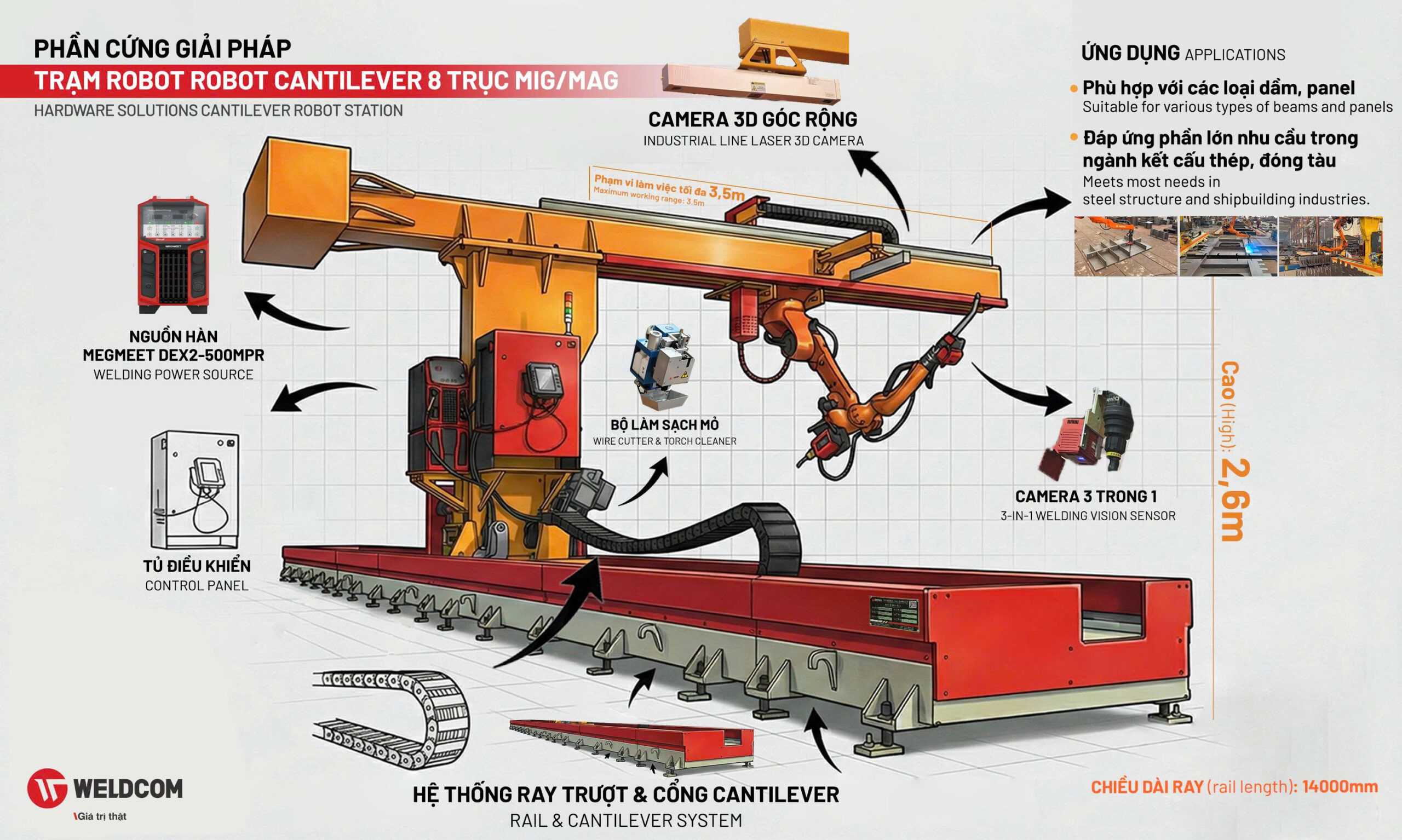
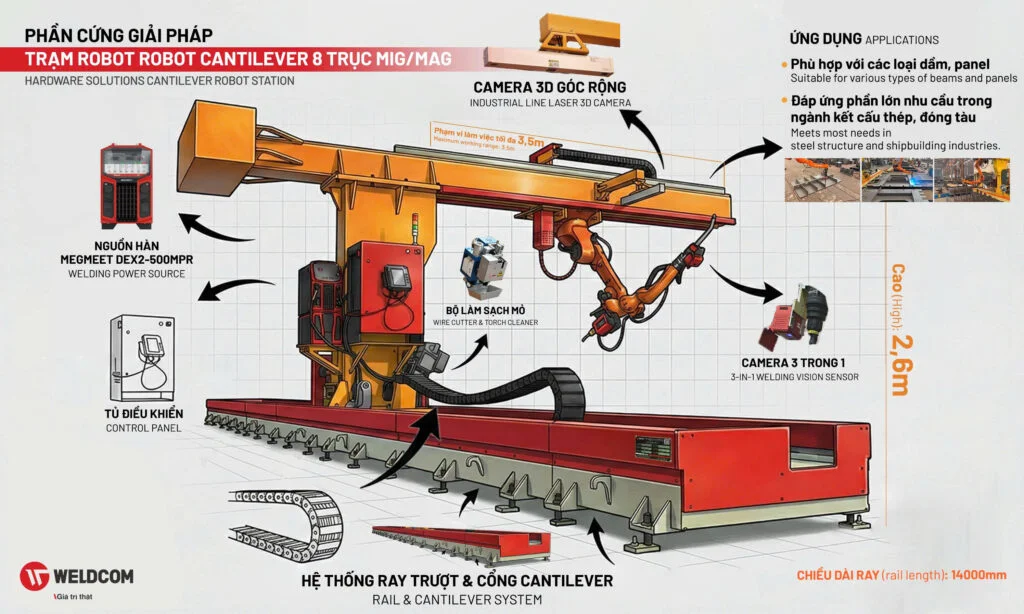
- Phù hợp dầm, panel và cấu kiện lớn trong ngành kết cấu thép, đóng tàu.
- Không cần lập trình thủ công
- Linh hoạt với nhiều loại sản phẩm, lô nhỏ, hàng tùy chỉnh
- Không yêu cầu độ chính xác phôi cao
- Vận hành đơn giản, chỉ cần kỹ năng máy tính cơ bản
Tính Năng Chính
Giải pháp Trạm Robot – Cantilever – là giải pháp tối ưu phù hợp với các loại dầm, panel, đáp ứng phần lớn nhu cầu trong ngành kết cấu thép, đóng tàu.
Đặc điểm của hệ thống
- Không cần lập trình thủ công
- Ứng dụng nhiều loại sản phẩm, thông số kỹ thuật, lô sản xuất nhỏ, sản phẩm tùy chỉnh
- Không yêu cầu độ chính xác đồng đều của phôi
- Người vận hành chỉ cần trình độ kỹ năng sử dụng máy tính cơ bản
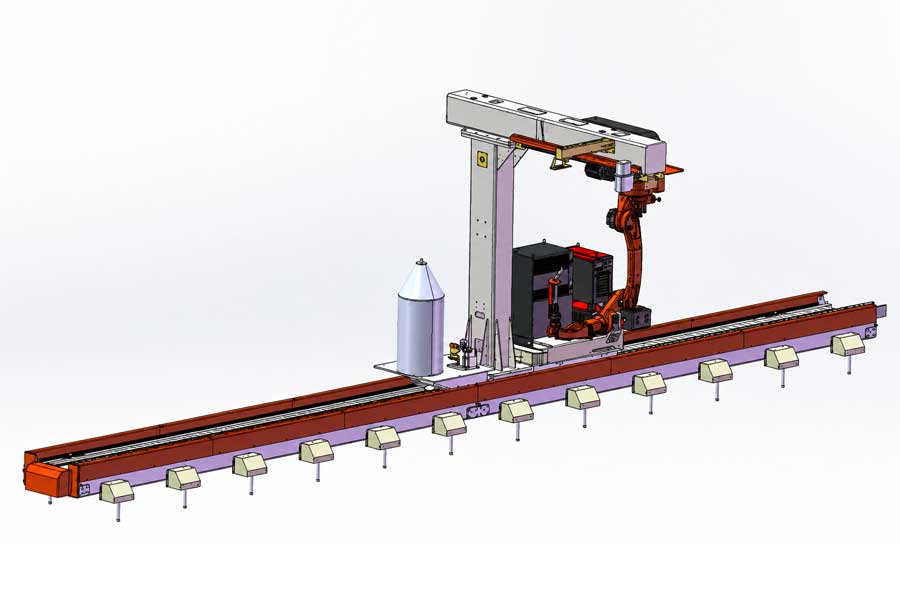
Diện tích mặt bằng yêu cầu cho trạm làm việc thông minh đường ray tiêu chuẩn: 6.5 mét × 14 mét
HỆ THỐNG VẬN HÀNH ROBOT THÔNG MINH HONGLU
- Hệ thống phát triển hoàn toàn độc lập bởi Honglu.
- Chức năng tích hợp sâu các quy trình hàn, sử dụng hệ thống thị giác để định vị chính xác các mối hàn của linh kiện. Dựa vào dự liệu toạ độ mối hàn thu được, hệ thống tích hợp cơ sở dữ liệu chuyên biệt để tự động tạo ra các chương trình hàn.
- Phần mềm được triển khai trên hệ thống máy tính cá nhân (PC), có thể được đặt ở bất kỳ đâu. Thông qua giao thức TCP/IP, hệ thống cho phép điều khiển và vận hành thiết bị hàn từ xa.
1. Nguyên lý hoạt động – CHẾ ĐỘ MÔ HÌNH HÓA NGƯỢC

- (1) Robot thực hiện quét toàn diện các chi tiết gia công thông qua camera global (có thể quét đồng thời nhiều part trong vùng làm việc)
- (2) Mô hình ngược được dựng lên dựa trên dữ liệu đám mây điểm được quét
- (3) Phần mềm tự động trích xuất thông tin đường hàn, khớp với thông số hàn và lên kế hoạch
- (4) Tiến hành kiểm tra, mô phỏng, phát hiện va chạm toàn bộ đường di chuyển của Robot. Sau khi xác minh không có lỗi, chương trình sẽ được gửi đến robot
- (5) Robot thực hiện quy trình hàn: quét và định vị chính xác từng đường hàn trước khi bắt đầu hàn
2. Nguyên lý hoạt động – CHẾ ĐỘ IMPORT 3D
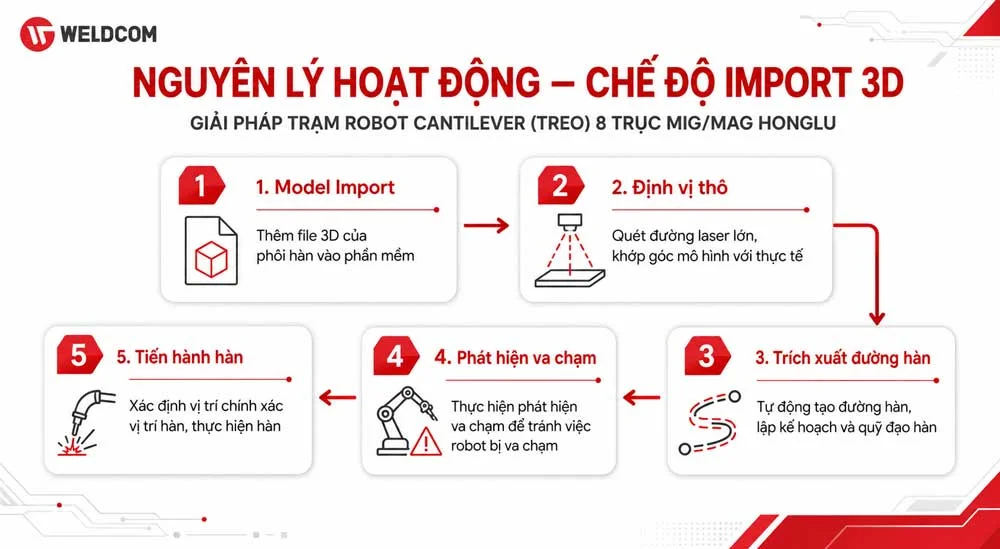
- (1) Import file 3D (STEP, IGS, IFC). Phần mềm tự động phân tích mối quan hệ hình học giữa các đối tượng
- (2) Người vận hành thực hiện quét laser đường và định vị gốc để xác định vị trí của phôi
- (3) Phần mềm tự động xuất thông tin đường hàn, so khớp các thông số hàn và lập kế hoạch cho quỹ đạo hàn
- (4) Tiến hành kiểm tra, mô phỏng, phát hiện va chạm toàn bộ di chuyển của Robot. Sau khi xác minh không có lỗi, chương trình sẽ được gửi đến robot
- (5) Robot thực hiện quy trình hàn, quét và xác định chính xác từng đường hàn trước khi bắt đầu

- Hệ thống không cần dạy (No-teaching): Mô phỏng 3D chính xác 1:1 chuyển động robot, dự đoán chu kỳ và va chạm giám thời gian lập trình
- Bộ điều khiển robot chuyên dụng cho hàn: Tích hợp các gói công nghệ hàn tấm trung bình – dày, hỗ trợ theo dõi hồ quang bằng dòng điện, laser, định vị đường hàn và thu nhận hình ảnh.
- Xử lý đám mây điểm: Phân tích dữ liệu quét để định vị phôi, nhận diện đường hàn, và dựng mô hình hóa ngược.
- Hỗ trợ đầy đủ chức năng teaching truyền thống và No-teaching: Với các mối hàn đặc thù hoặc không gian hạn chế, người vận hành có thể dùng tay dạy điểm; robot sẽ tự động khớp thông số hàn và thực hiện đường hàn theo chương trình tối ưu.
HỆ THỐNG CANTILEVER 8 TRỤC
| Model | 14X_2.5Y |
| Cấu tạo | Động cơ đồng bộ trục X, Y |
| Tải trọng | 500Kg |
| Sai số | ±0.5 mm |
| Số trục | 2 |
| Chiều dài X/Y | 14 mét / 2.5 mét |
| Tốc độ tối đa 2 chiều | 18 m/min |
CAMERA 3D 3 IN 1
| Thông số kỹ thuật | ||||
| Thời gian chụp toàn khung (Typical Full Frame Capture Time) | 0.2–0.8 s (Tối đa 6 FPS) | |||
| Kích thước camera | 120×104×86.5 mm | |||
| Độ dài baseline | 90 mm | |||
| Khối lượng camera | 0.9 kg | |||
| Chức năng camera | Trích xuất đường hàn (Weld Seam Extraction) + Bám đường hàn (Weld Seam Tracking) | |||
| Dải khoảng cách làm việc | 300–1200 mm | |||
CAMERA 3D GÓC RỘNG
| Hạng mục | Thông số |
| Ứng dụng | Dây chuyền sản xuất, băng tải, hệ thống tự động hóa |
| Khoảng cách làm việc | 2000 – 4000 mm |
| Trường nhìn quét (FOV) | 1750 × 2800 mm (gần) / 3000 × 5000 mm (xa) |
| Độ chính xác trục X/Y/Z | ±0.5 – 2.1 mm (tùy khoảng cách) |
| Tốc độ quét tối đa | 6000 lines/s |

Bạn cần hỗ trợ về thông tin máy?
Xin liên hệ với chúng tôi!
Liên hệ ngay Xin liên hệ với chúng tôi!